Giovanni Indino – Advanced robotic manipulation
What motivated you to choose the Master’s degree course in Automation Engineering and which specific areas interested you the most?
I chose to continue my studies in Automation Engineering because the Bachelor’s programme, in addition to fascinating me, provided me with a broad and transversal education, leaving me with the desire to further explore more specific topics. In particular, I was captivated by robotics and advanced control of systems, as I firmly believe that robotics will play an increasingly decisive role in the future, profoundly transforming both the industrial and social landscape. The opportunity to design and optimize intelligent systems capable of interacting effectively with the real world is what motivates me most in my academic journey.
Tell us about a significant experience you had during your studies, such as a practical project or a collaboration with companies in the sectors that interest you the most.
During my studies, I had several significant experiences, but two in particular had a strong impact on my education. The first was a group project in which we were tasked with controlling an inverted pendulum. This project proved to be extremely stimulating because it allowed me to concretely apply the control theory knowledge acquired over the years, tackling practical challenges related to stabilizing an intrinsically unstable system. The second experience was an exam on measurement systems, where we were given the opportunity to present a project related to the course topics. I chose to develop a system for monitoring driver drowsiness, integrating both hardware and software components, including artificial neural networks. It was an exciting opportunity to combine theory and practice, pushing me to devise an innovative solution with potential real-world applications.
How has the multidisciplinary nature of the course influenced your professional choices, and what career opportunities do you think may open up thanks to the variety of skills acquired?
The multidisciplinary nature of the course allowed me to develop a broad and integrated vision of automation, combining knowledge in control, robotics, and artificial intelligence. This opens up opportunities for me both in research, with a possible PhD, and in industry, where I can contribute to the development of innovative solutions for advanced robotics and intelligent automation.
Can you tell us about your Master’s thesis? What was the topic addressed, and how did you apply the knowledge acquired during your studies to the research or project you developed?
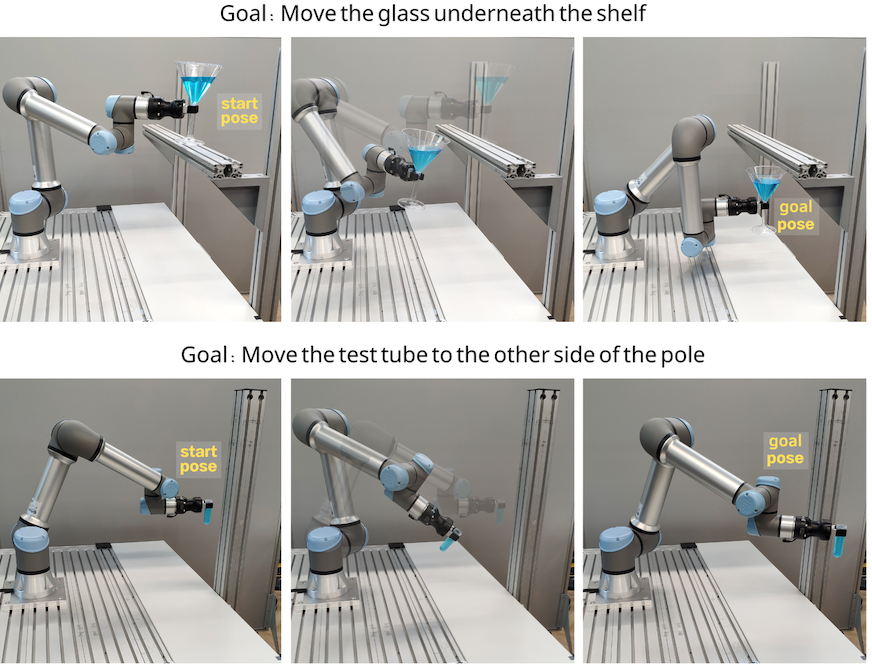
My Master’s thesis focuses on the optimized trajectory planning for a robotic manipulator carrying a container with liquid, minimizing execution time while ensuring that the liquid is not spilled. To address this problem, I combined path planning techniques with classification models to predict the risk of spillage. In addition, I implemented an algorithm capable of managing a sort of trade-off between execution speed and stability. This project allowed me to concretely apply many of the skills acquired during my studies, including modeling and control of dynamic systems, machine learning, and robotic motion planning. Working on this thesis provided me with practical experience in integrating advanced methods for decision-making in real-world automation scenarios.